I'm a graduate from IIT Kanpur (IITK) with a BTech in Electrical Engineering and minors in Computer Systems and Theory of Computing. I also got an admit in MRSD program at CMU starting Fall'25. But I didn't join CMU, and chose to build iCurious AI instead.
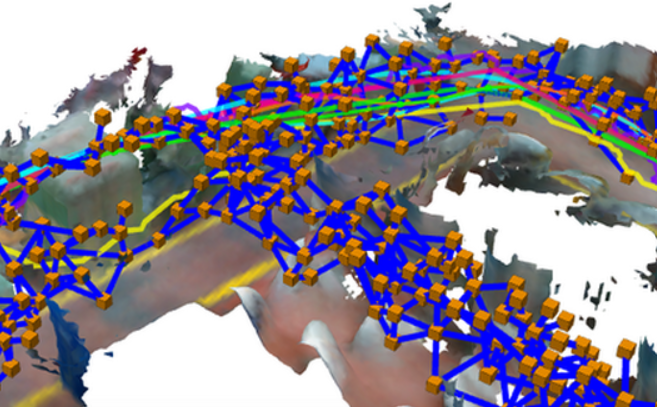
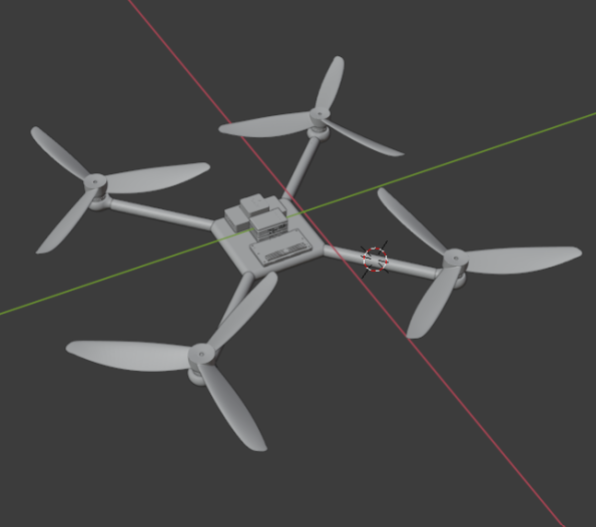
I'm passionate about Robotics, Computer Vision, AI, Software Development and learning about life in general. During my undergrad, I was an active member of Aerial Robotics IITK, working on various robotics projects and competitions.
To be honest, many things interest me that I haven't explored enough which include, but not limited to, Virtual and Augmented Reality, Cryptocurrency, Blockchain, Cognitive Science, Genetics, Philosophy, Art, Psychology, History and Economics which I explore through reading books in my leisure.